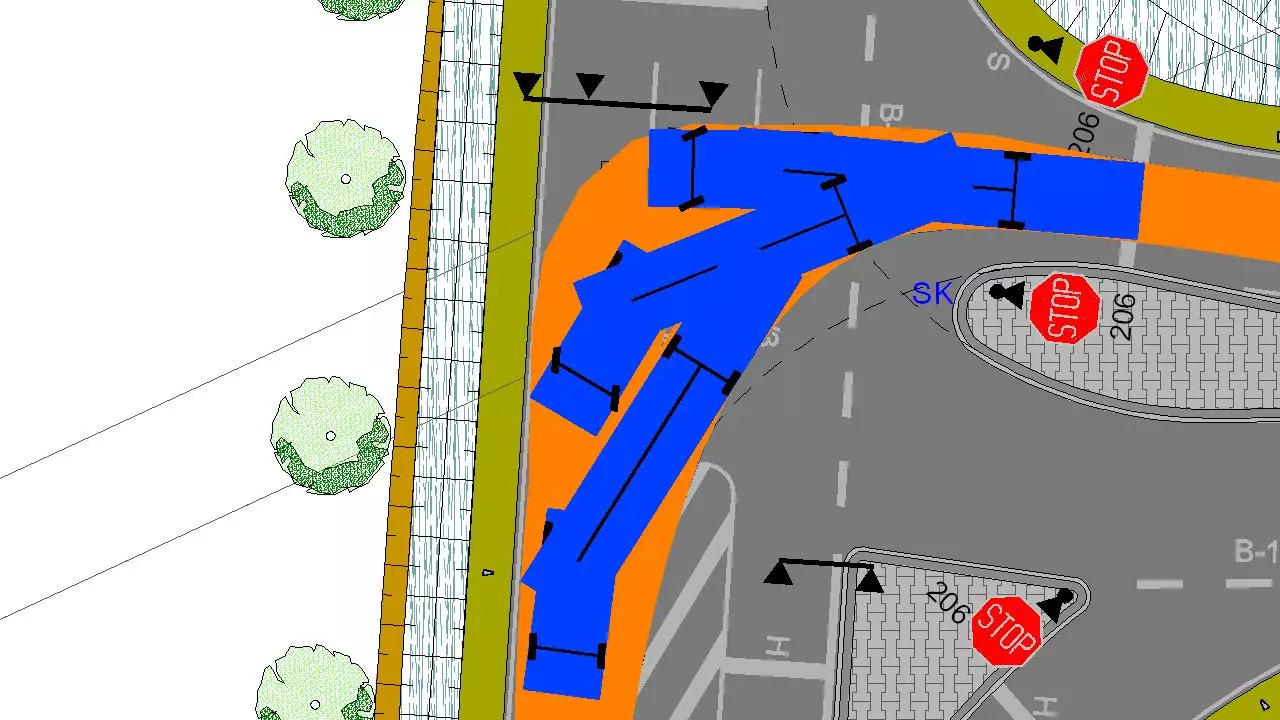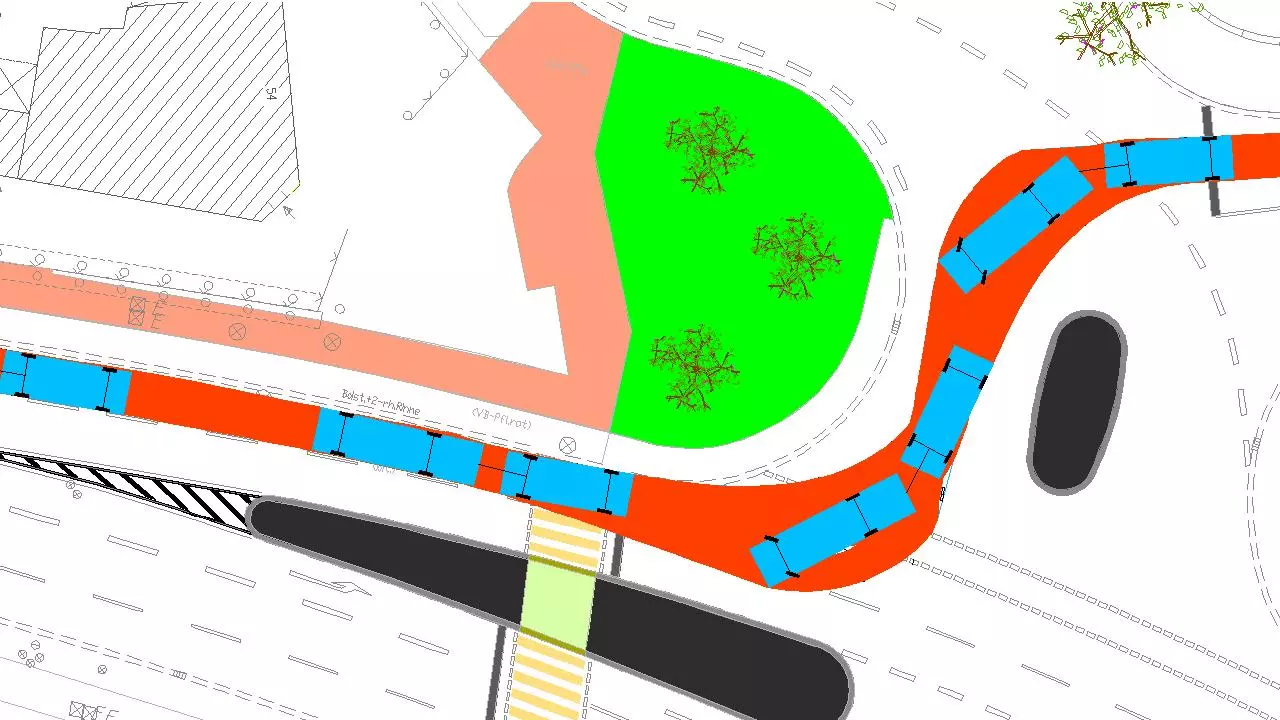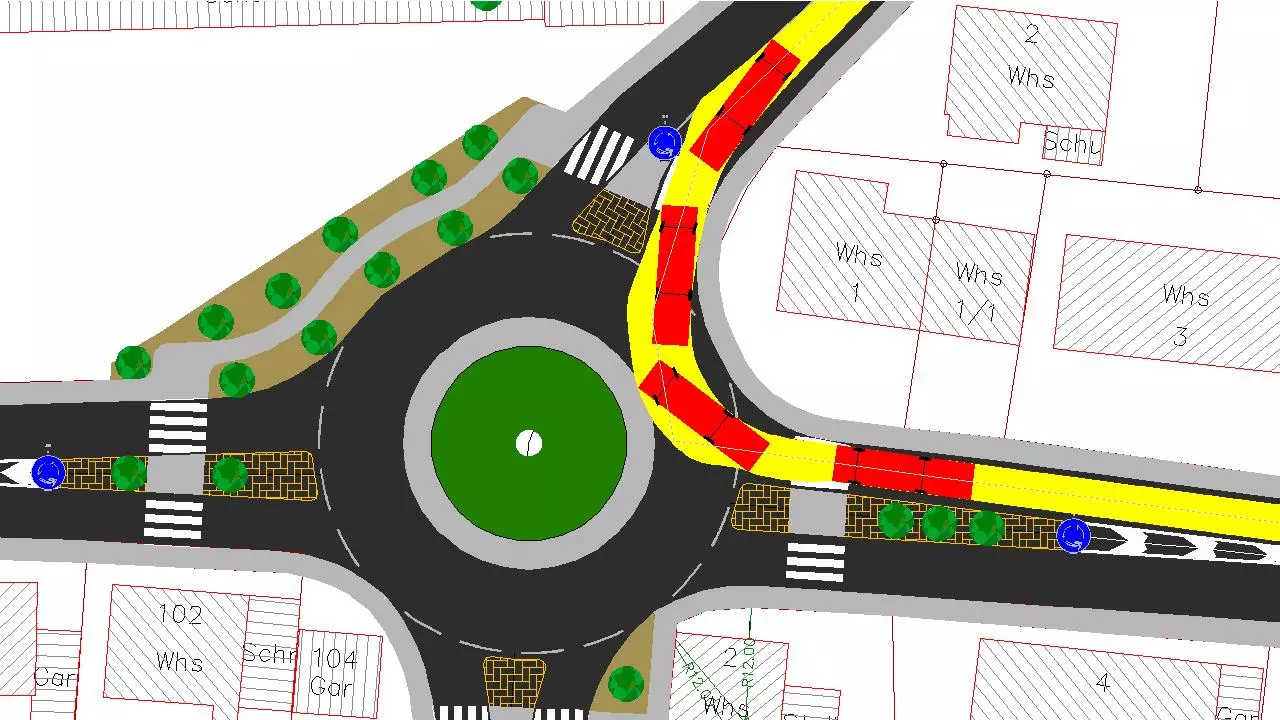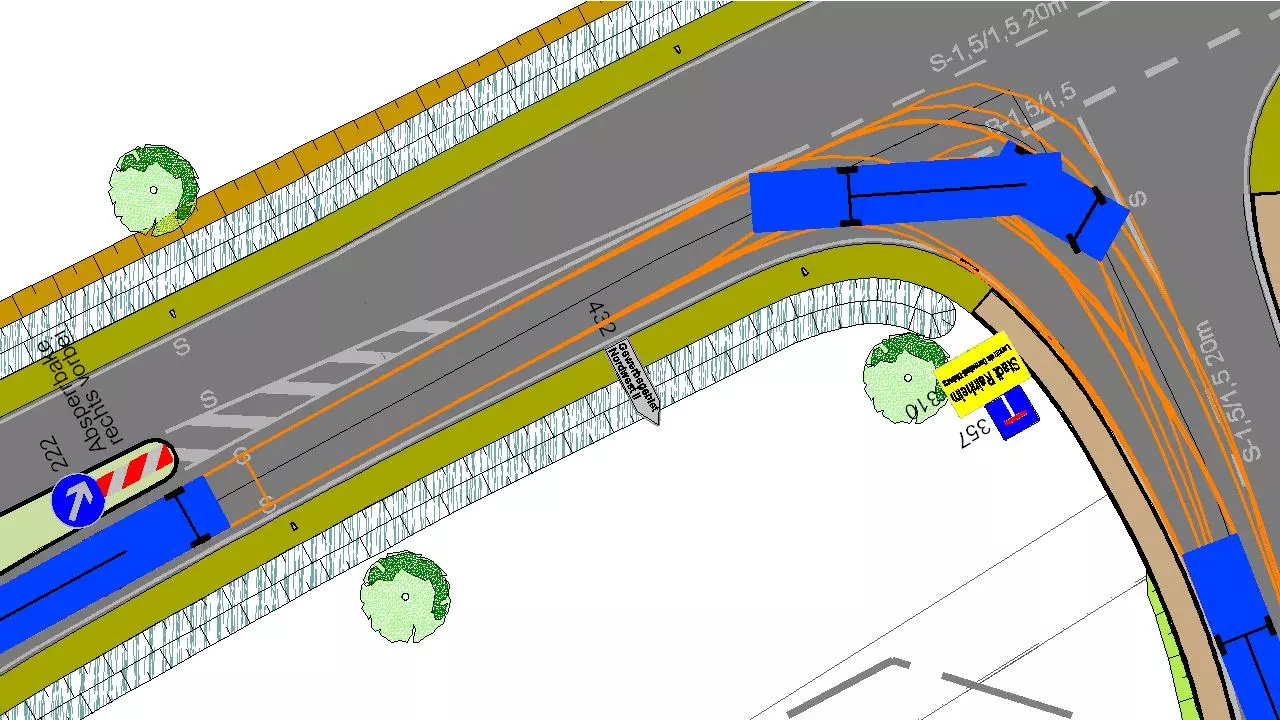
Swept path
BBSoft® offers a comprehensible solution for testing the trafficability of traffic areas. With this module you can draw driving curves of different vehicle types (car, bus, ...) with different steering behaviour and adjust them in an interactive way in the location plan to the local situation.
The user can choose between four different ways of driving:
- Way of driving along a constraining line: The vehicle is dragged along upon the polygon, without considering the minimal radius of the turning circle and without balancing the polygon also.
- Way of driving 1 (according to FGSV): The steering angle is carried out during the driving. The transition points from the line into the circular arc occur tangentially, so that no buckles will develop on them.
- Way of driving 2 (according to FGSV): The driver turns in with an almost standing vehicle and initiates then. This way of driving, with a maximal change of the steer angle during standing, is simulated with the assumption of an abrupt transition between line and circular arc.
- Way of driving during parking processes: By this way of driving the driver turns in the front wheels while almost standing and drives therefore directly from a line in a circular arc with a constantly held steering angle.
Further features:
- determining swept pathes over a quick construction or along an existing CAD-polygon (e.g. borders)
- standard design vehicles according to the FGSV
- new guideline "Bemessungsfahrzeuge und Schleppkurven zur Überprüfung der Befahrbarkeit von Verkehrsflächen RBSV (2020)" was integrated
- define own vehicle types in a comfortable vehicle editor (e.g. fire engine and combine harvester)
- swept paths of gigaliners or bicycles can be created
- an individual configuration of vehicles is possible
- surface, which is overrun, total surface and room for manoeuvre can be hatched differently
- vehicle changes can be performed without any problems
- dynamic driving simulation
- output of bending angle protocol
- automatic creation of a legend
- consideration of room for manoeuvre left/right
- reference point (alignment, left/right front wheel) freely selectable
- reversing for single vehicles
- subsequent editing of swept path simplified: real time preview of required space during shifting of base point
- additional identic trailer
- preview during creation of driving curve: turning circle radius to the left/right
required modules: BB-VKNT